GEP2013IL-00-B
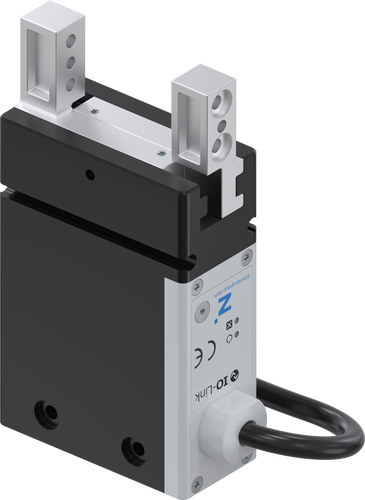
2-Jaw Parallel Grippers
Series GEP2000
"The electric compact one"
- Largest stroke in small installation space
Do you require a large stroke, due to the fact that you are operating either a form fit gripper or a large range of parts but the installation space and the load capacity of your application is limited? Then this gripper is perfect for you! - The simplest activation
It is your choice whether you want to control the gripper by means of I/O ports—like a valve—or if you prefer the version with IO-Link. Both have this in common: they are easy to integrate into your control system. - Positionability via IO-Link
Allows you to position the gripper jaws of the IL-03 and IL-43 variant. In this way, the stroke can be flexibly adapted to the workpiece, which saves time in the process and prevents interfering contours.
Equipment/Options
 10 million maintenance-free cycles (max.)
10 million maintenance-free cycles (max.) Integrated sensing
Integrated sensing IP40
IP40 Self locking mechanism
Self locking mechanism Gripping force adjustable
Gripping force adjustable IO-Link
IO-Link Cleanroom-certified
Cleanroom-certified
Technical Data
| Control | IO-Link |
| Stroke per jaw | 13 [mm] |
| Position sensing using process data | Yes |
| Self locking mechanism | mechanical |
| Control time | 0,055 [s] |
| Dead weight of mounted gripper finger max. | 0,15 [kg] |
| Length of the gripper fingers max. | 100 [mm] |
| Repetition accuracy +/- | 0.02 [mm] |
| Operating temperature | 5 ... +60 [°C] |
| Voltage | 24 [V] |
| Current consumption max. | 2 [A] |
| Minimum positioning path per jaw | 0.5 [mm] |
| Clean room applications according to DIN EN ISO 14644-1 | 2 |
| Protection to IEC 60529 | IP40 |
| Weight | 0.55 [kg] |
| Gripping force level 1 | 90 [N] |
| Closing time / Opening time level 1 | 0.42 / 0.42 [s] |
| Gripping force level 2 | 180 [N] |
| Closing time / Opening time level 2 | 0.32 / 0.32 [s] |
| Gripping force level 3 | 270 [N] |
| Closing time / Opening time level 3 | 0.26 / 0.26 [s] |
| Gripping force level 4 | 360 [N] |
| Closing time / Opening time level 4 | 0.23 / 0.23 [s] |



Benefits in detail
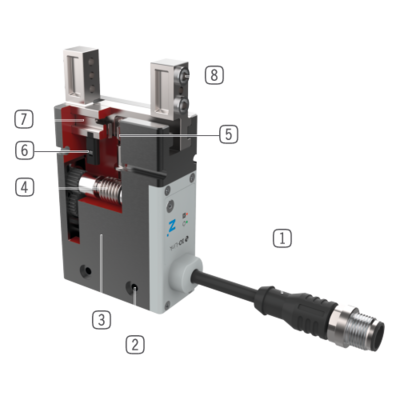
- Control
Via I/O ports (IO) or via IO-Link (IL) - Mounting and positioning
mounting possible from several sides for versatile positioning - BLDC motor
wear-resistant brushless DC motor - Helical worm gear
self locking mechanism in case of power drop - Synchronization
via rack and pinion - Position sensing
Permanent magnet for direct query of jaw movement via magnetic field sensors - Gripper jaw
individual gripper finger mounting - Removable centering sleeves
quick and economical positioning of the gripper fingers
