AR63P

Équilibrages d'axe
Série ARP
- Position médiane verrouillable
Lors du déplacement de votre robot, vous pouvez fixer le dispositif d’équilibrage afin d’éviter tout mouvement incontrôlé de la pièce à usiner - Construction ultra plate
Ce type de construction réduit au minimum la charge de couple pour votre robot et permet l’utilisation d’outils de plus petite taille et moins chers - Forces de compensation et couples variables
Ajustez le dispositif d’équilibrage à votre poids de manutention en montant le paquet de ressorts selon la rigidité souhaitée
Données techniques
| Bride de raccordement pour EN ISO 9409-1 | TK 63 |
| Encombrement en hauteur | 24 [mm] |
| Déviation horizontale +/- | 2 [mm] |
| Déviation horizontale +/- | 1 [°] |
| Déviation verticale +/- | 2 [mm] |
| Déviation verticale +/- | 1 [°] |
| Force de centrage lors du verrouillage | 600 [N] |
| Précision de répétition horizontale +/- | 0.05 [mm/°] |
| Précision de répétition verticale +/- | 0.05 [mm/°] |
| Volume d’air par cycle | 3.6 [cm³] |
| Pression de service | 1 ... 8 [bar] |
| Pression de service nominal | 6 [bar] |
| Température de service | 5 ... +80 [°C] |
| Moment d’inertie | 2.8 [kgcm²] |
| Poids | 0.39 [kg] |


Avantages en détail
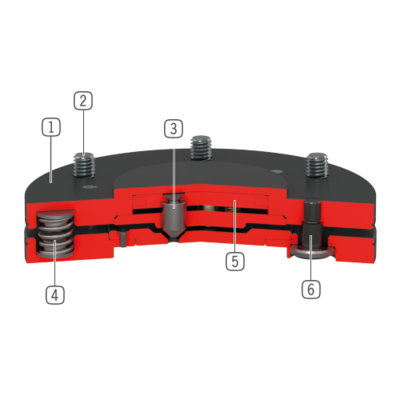
- Boîtier robuste et léger
Alliage aluminium anodisé - Bride de connexion au robot
diamètre et usinage aux normes EN ISO 9409-1 - Verrouillage
3 pistons de verrouillage acier nitruré - Paquet de ressorts
un plus important à partir de la taille 63 à partir de la taille 100, possibilité d‘enlever 3 ressorts - Entraînement de verrouillage
vérin simple effet pneumatique - Goujon de guidage avec coussinet sphérique