Smart Communication Module
Série SCM

- Conversion IO-Link vers entrées et sorties numériques (Digital I/O), et Digital I/O vers IO-Link
- Commande ultra simple des pinces IO-Link intelligentes via Digital I/O 24 V
- La configuration et l’apprentissage sont assurés par le logiciel intuitif associé guideZ
- Jeu de câbles prêt à être raccordé pour le type de contrôleur correspondant
- Peut être utilisé avec une ou deux pinces selon la flexibilité requise
- En fonction de la flexibilité nécessaire, jusqu'à 15 pièces différentes peuvent être utilisées pour un préhenseur. En alternative, deux pinces peuvent être utilisées.
| N° de commande | Pour type de robot | Pour type de contrôleur | Logique IO | |
|---|---|---|---|---|
| SCM-C-00-00-A | Indépendant du fabricant | Indépendant du fabricant | PNP | |
| SCM-C-01-00-A | Universal Robots | Universal Robots - OEM | PNP | |
| SCM-C-02-01-A | Yaskawa GP / HC-Series | Yaskawa - YRC 1000 | PNP | |
| SCM-C-02-02-A | Yaskawa GP / HC-Series | Yaskawa - YRC 1000 NPN | NPN | |
| SCM-C-02-11-A | Yaskawa GP / HC-Series | Yaskawa - YRC 1000-micro | PNP | |
| SCM-C-02-12-A | Yaskawa GP / HC-Series | Yaskawa - YRC 1000-micro NPN | NPN | |
| SCM-C-03-01-A | DENSO | Denso - RC8A (Hand-IO) | PNP | |
| SCM-C-05-00-A | ABB CRB 15000 GoFa | ABB - OmniCore C30 | PNP | |
| SCM-C-05-10-A | ABB CRB 1100 SWIFTI | ABB - OmniCore C30/C90XT | PNP | |
| SCM-C-05-20-A | ABB IRB1100 | ABB - OmniCore C30/C90XT | PNP |
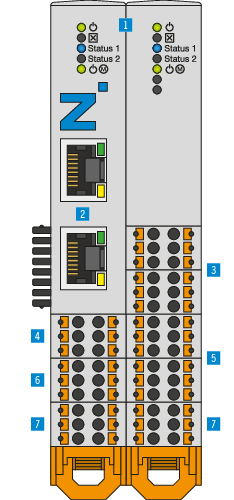
- État Affichage d’état du SCM et de l’appareil IO-Link
- Ethernet RJ45 Connexion temporaire à la configuration de la pince
- Digital Input Entrées numériques pour commander les actionneurs de la pince
- IO-Link / Appareil 1 Raccordement du module de préhension 1
- Digital Output Sorties numériques pour surveiller les capteurs de la pince
- IO-Link / Appareil 2 Raccordement du module de préhension 2
- Alimentation Alimentation électrique du SCM et de la pince