GEP2010IO-45-B

Parallelle grijper met 2 vingers
Serie GEP2000
"De compactste elektrische"
- Grootste slag in een beperkte bouwruimte
Hebt u een grote slag nodig omdat u nauw aansluitend wilt grijpen of een groot assortiment onderdelen wilt verplaatsen, maar is de beschikbare ruimte en de draagkracht van uw applicatie beperkt? Dan is deze grijper iets voor u! - Eenvoudige besturing
Of u de grijper nu net zoals een klep wilt besturen via de I/O-poort of de versie met IO-link verkiest, is helemaal aan u. Eén ding hebben ze gemeen, beide versies zijn gemakkelijk in uw besturing te integreren. - Positioneerbaarheid via IO-Link
Hiermee kunt u de grijpervingers van de IL-03-variant positioneren. Hierdoor kan de slag flexibel aan het werkstuk worden aangepast, wat tijd bespaart in het proces en obstakels voorkomt.
Uitrusting/opties
 10 milj. cycli zonder onderhoud (max.)
10 milj. cycli zonder onderhoud (max.) Geïntegreerde positiebepaling
Geïntegreerde positiebepaling IP54
IP54 Mechanisch zelfremmend
Mechanisch zelfremmend Grijpkracht instelbaar
Grijpkracht instelbaar Gecertificeerd voor cleanroom
Gecertificeerd voor cleanroom
Technische gegevens
| Besturing | I/O |
| Slag per vinger | 13 [mm] |
| Positiebepaling analoog 0 ... 10 V | Ja |
| Zelfremmend | Mechanisch |
| Besturingstijd | 0,03 [s] |
| Eigen gewicht van gemonteerde grijpvinger max. | 0.1 [kg] |
| Lengte grijpvinger max. | 80 [mm] |
| Herhaalbaarheid +/- | 0.02 [mm] |
| Bedrijfstemperatuur | 5 ... +60 [°C] |
| Spanning | 24 [V] |
| Stroomopname max. | 1 [A] |
| Minimum naderingsafstand per vinger | 0.5 [mm] |
| Cleanroomklasse volgens DIN EN ISO 14644-1 | 2 |
| Beschermingsklasse conform IEC 60529 | IP54 |
| Gewicht | 0.47 [kg] |
| 50 [N] | |
| 0.42 / 0.42 [s] | |
| 100 [N] | |
| 0.35 / 0.35 [s] | |
| 150 [N] | |
| 0.33 / 0.33 [s] | |
| 200 [N] | |
| 0.27 / 0.27 [s] |
Opbouw in doorsnede
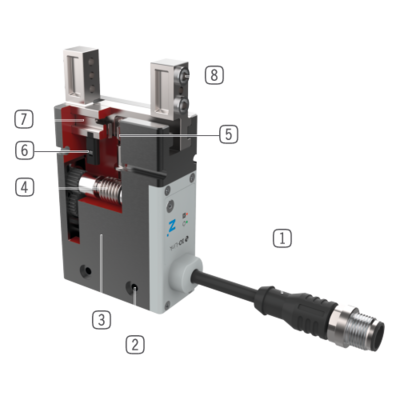
- Besturing
via I/O-poorten (IO) of via IO-Link (IL) - Bevestiging en positionering
Alternatief aan meerdere zijden voor een afzonderlijke montage - BLDC-motor
slijtage-arme borstelloze gelijkstroommotor - Schuin tandwiel / wormwiel
Zelfremming in geval van stroomdaling - Synchronisatie
via tandwiel en tandstang - Positiebepaling
Permanente magneet voor directe positiebepaling van de vingerbeweging via magnetische veldsensoren - Grijpervinger
Bevestiging van de individuele grijpvinger - Verwijderbare centreerhuls
snelle en rendabele positionering van de grijpvingers
