
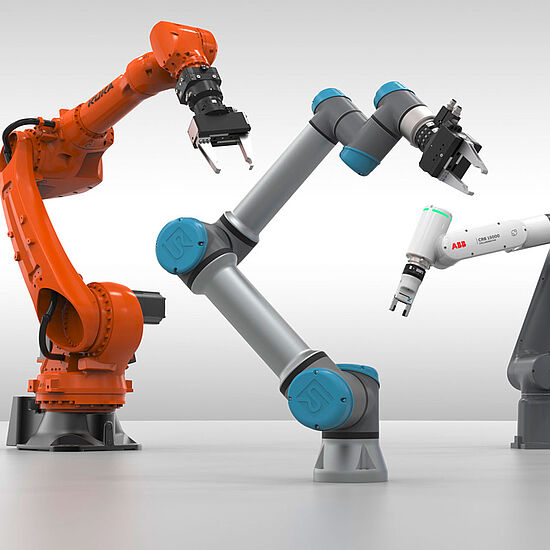
Tecnología para robots
Nuestra gama incluye un amplio espectro tecnológico para robots, desde cambiadores de herramienta y anticolisiones hasta compensadores de ejes para la robótica industrial y de peso ligero.









Componentes de la tecnología para robots







Cambiadores de herramienta
Serie WWR

- Brida de sujeción a robot según circulo primitivo EN ISO 9409-1
- Para un peso de manipulación de hasta 300 kg
1. Cambiadores de herramienta

- Brida de sujeción a robot según circulo primitivo EN ISO 9409-1
- Para un peso de manipulación de hasta 300 kg
Referencia del componente
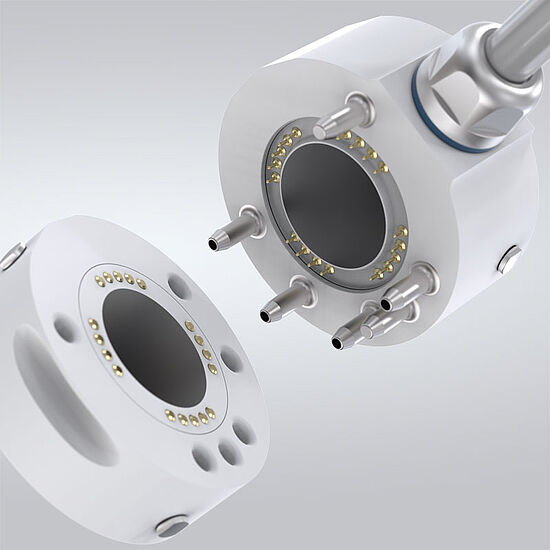
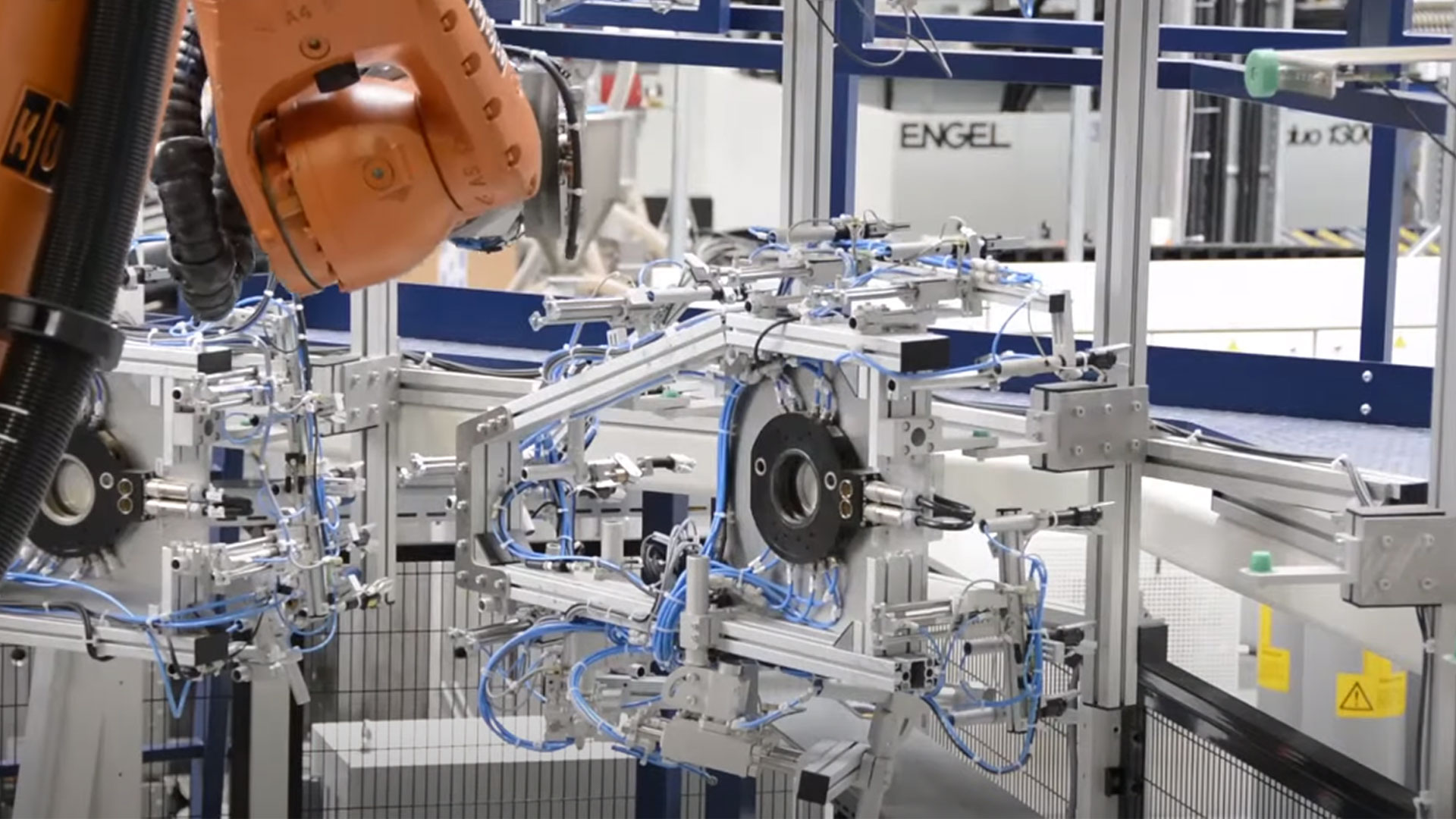
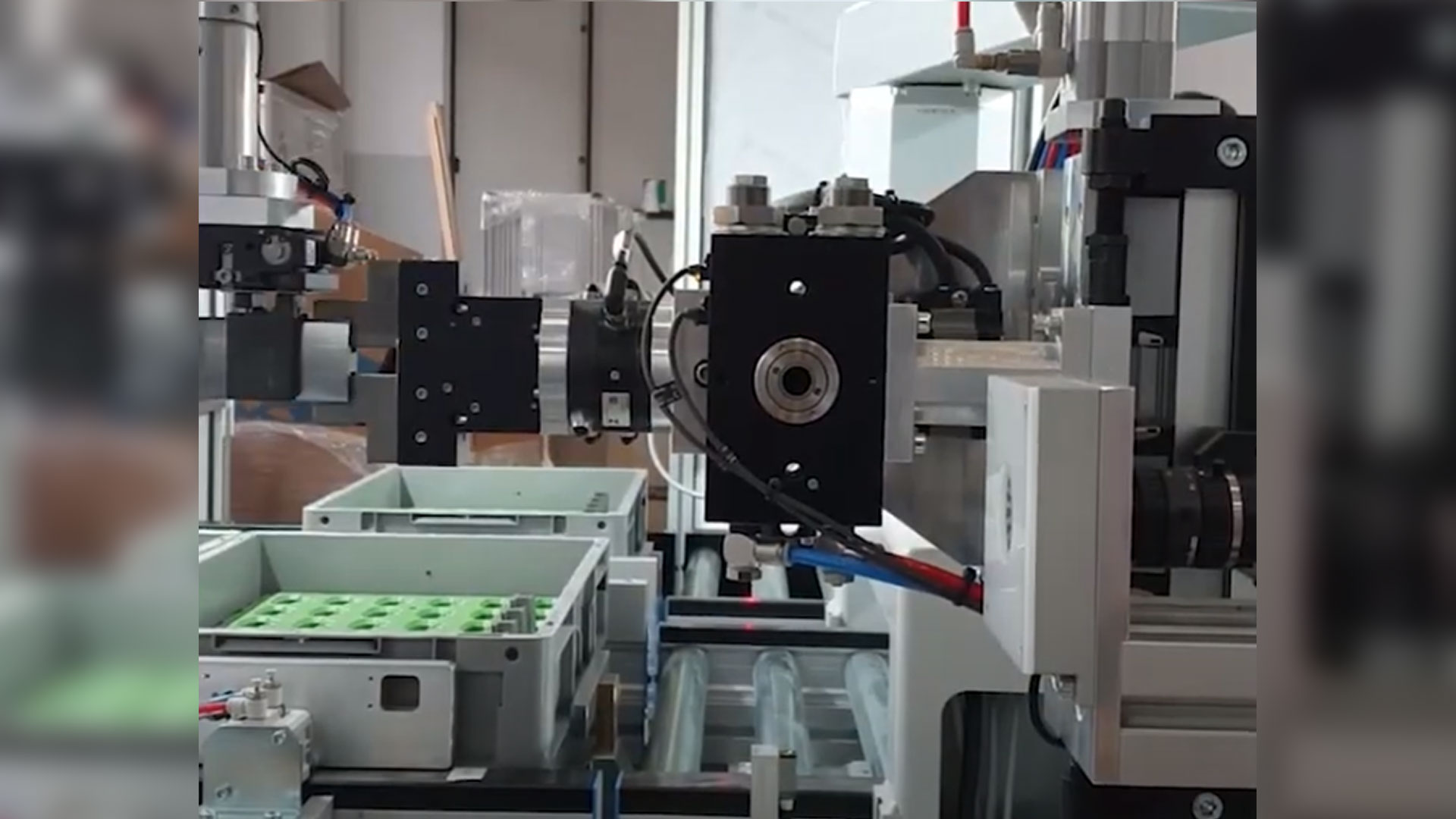
Accesorios para robots - Cambiador de herramientas WWR en funcionamiento

Cambiadores de herramienta
Serie FWR

- Cambio de herramienta automatizado sin accionamiento externo
- Cambio de herramienta manual
- Transmisión de medios opcional
1. Cambiadores de herramienta

- Cambio de herramienta automatizado sin accionamiento externo
- Cambio de herramienta manual
- Transmisión de medios opcional

Cambiadores de herramienta
Serie FWR
- Cambio de herramienta automatizado sin accionamiento externo
- Cambio de herramienta manual
- Transmisión de medios opcional
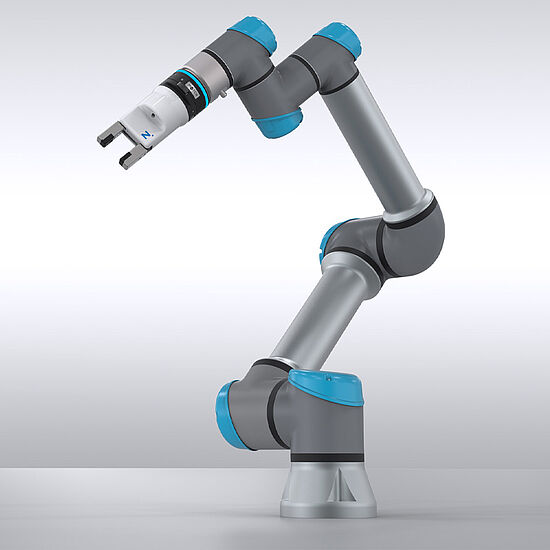
Pinzas paralelas de gran recorrido
Serie LWR
- Pinzas colaborativas con certificación DGUV
- Servoaccionamiento con controlador integrado
- Versión sensible
- Control IO-Link
- Uso en combinación con piezas fijas LWR (IO-Link/RS485)
- Óptimo para aplicaciones de piezas más grandes así como de diferentes dimensiones gracias a la servotecnología
1. Cambiadores de herramienta
- Cambio de herramienta automatizado sin accionamiento externo
- Cambio de herramienta manual
- Transmisión de medios opcional
2. LWR-HRC-02
- Pinzas colaborativas con certificación DGUV
- Servoaccionamiento con controlador integrado
- Versión sensible
- Control IO-Link
- Uso en combinación con piezas fijas LWR (IO-Link/RS485)
- Óptimo para aplicaciones de piezas más grandes así como de diferentes dimensiones gracias a la servotecnología

Cambiadores de herramienta
Serie WWR1000


Pinzas paralelas de gran recorrido
Serie GEH6000IL


Pinzas paralelas
Serie GPP5000

- Guía lineal de acero: un concepto de guía superior
- Estanca y protegida contra la corrosión: la pinza universal
- Guía lineal de aluminio: la alternativa
Unidades de giro
Serie SF-C

- Amortiguación de la posición final a través de amortiguadores hidráulicos con tecnología de ranura helicoidal
- Par de giro de hasta 130 Nm
Distribuidores de giro
Serie DVR

- Adecuado para cargas bajas y altas
- Brida de conexión según EN ISO 9409-1: TK40... TK160
- Con 4...8 pasillos neumáticos
- Con 4...12 pasajes eléctricos
1. Pinzas paralelas

- Guía lineal de acero: un concepto de guía superior
- Estanca y protegida contra la corrosión: la pinza universal
- Guía lineal de aluminio: la alternativa
2. Módulos orientables y de giro

- Amortiguación de la posición final a través de amortiguadores hidráulicos con tecnología de ranura helicoidal
- Par de giro de hasta 130 Nm
3. Distribuidores de giro

- Adecuado para cargas bajas y altas
- Brida de conexión según EN ISO 9409-1: TK40... TK160
- Con 4...8 pasillos neumáticos
- Con 4...12 pasajes eléctricos

Cambiadores de herramienta
Serie WWR
- Brida de sujeción a robot según circulo primitivo EN ISO 9409-1
- Para un peso de manipulación de hasta 300 kg
1. Cambiadores de herramienta
- Brida de sujeción a robot según circulo primitivo EN ISO 9409-1
- Para un peso de manipulación de hasta 300 kg

Pinzas paralelas
Serie GEP2000

- Gran recorrido con mínimo espacio constructivo
- El accionamiento más sencillo
- Posicionamiento mediante IO-Link
1. Pinzas paralelas

- Gran recorrido con mínimo espacio constructivo
- El accionamiento más sencillo
- Posicionamiento mediante IO-Link


Pinzas paralelas
Serie GEP2000
- Gran recorrido con mínimo espacio constructivo
- El accionamiento más sencillo
- Posicionamiento mediante IO-Link
Cambiadores de herramienta
Serie WWR
- Brida de sujeción a robot según circulo primitivo EN ISO 9409-1
- Para un peso de manipulación de hasta 300 kg
1. Pinzas paralelas
- Gran recorrido con mínimo espacio constructivo
- El accionamiento más sencillo
- Posicionamiento mediante IO-Link
2. Cambiadores de herramienta
- Brida de sujeción a robot según circulo primitivo EN ISO 9409-1
- Para un peso de manipulación de hasta 300 kg

Cambiadores de herramienta
Serie WMR2000


Referencia del componente
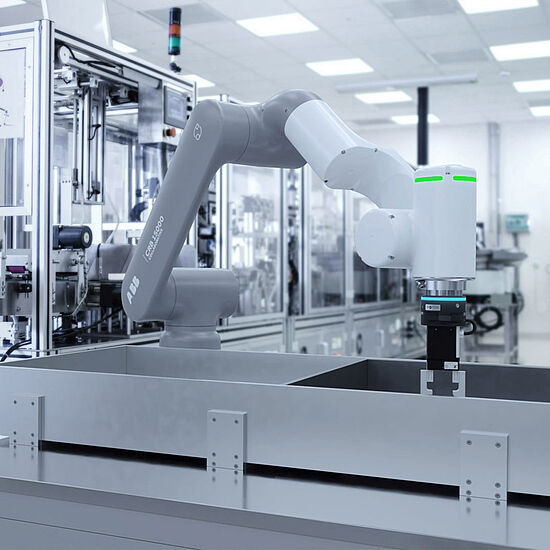
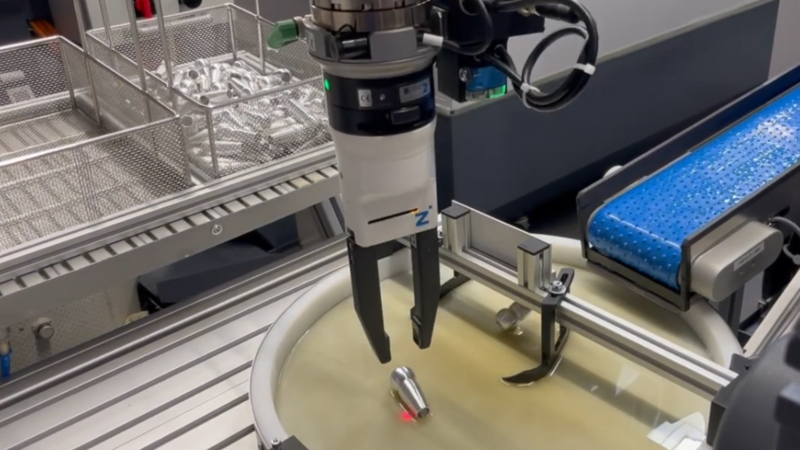
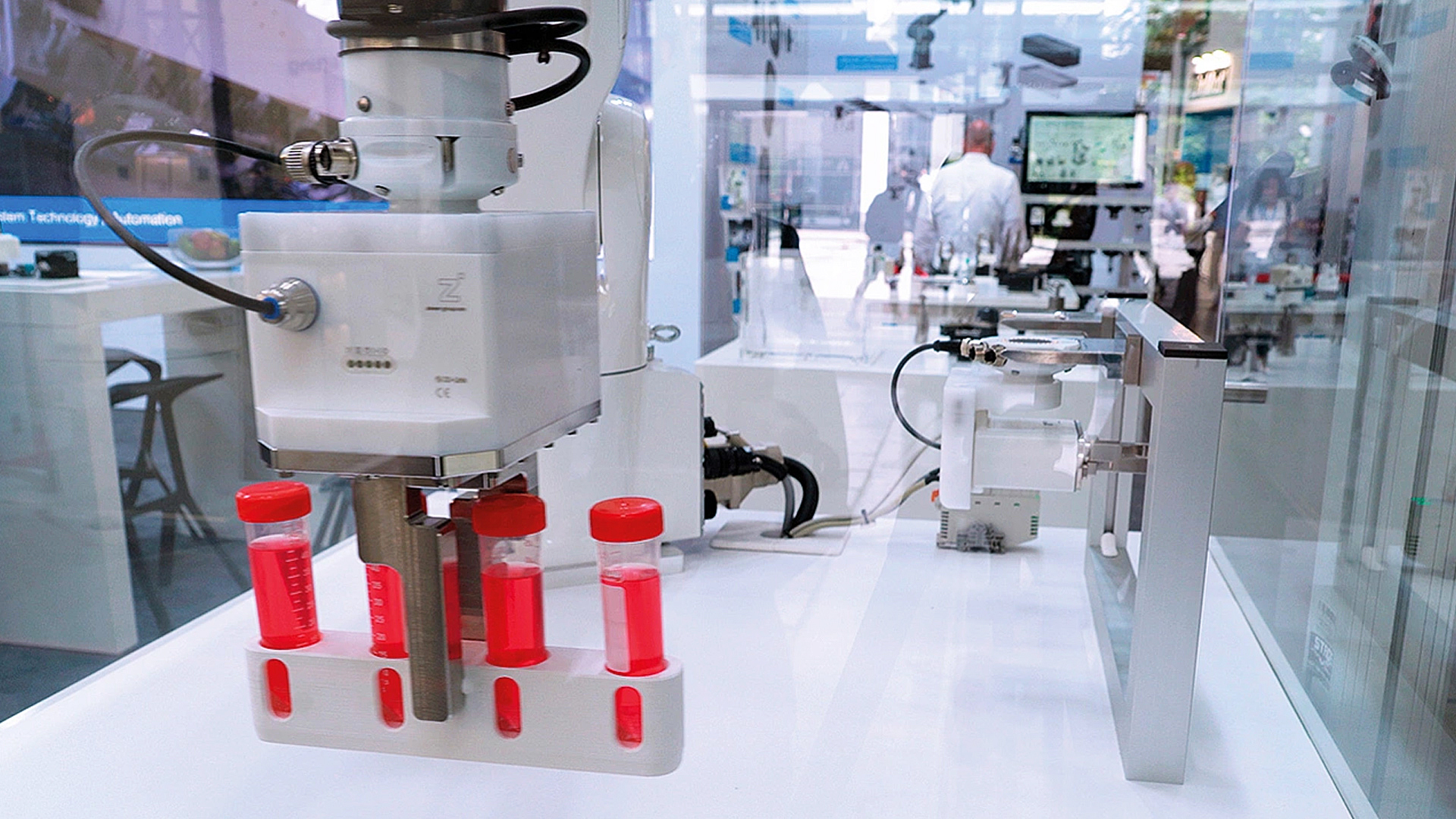
Sistemas de automatización para entornos sensibles en la industria farmacéutica

Pinzas paralelas
Serie LWR
1. LWR



