智能通信模块
SCM 系列

- 将 IO-Link 转换为数字输入和输出端(数字 I/O),以及从数字 I/O 转换为 IO-Link
- 通过 24V电压 数字 I/O 轻松控制 智能 IO-Link 机械夹爪
- 使用相应的直观软件 guideZ 进行配置和示教
- 相应控制器类型的即用连接电缆套件
- 根据客户所需,可灵活使用一个或两个机械抓手
- 根据所需的灵活性,一个机械手最多可使用 15 个不同的工件。也可以使用两个机械手。
| 订单号 | 适用于机器人类型 | 适用于控制器类型 | IO 逻辑 | |
|---|---|---|---|---|
| SCM-C-00-00-A | 不受限于生产商 | 不受限于生产商 | PNP | |
| SCM-C-01-00-A | Universal Robots | 通用机器人 - OEM | PNP | |
| SCM-C-02-01-A | Yaskawa GP / HC-Series | 安川 - YRC 1000 | PNP | |
| SCM-C-02-02-A | Yaskawa GP / HC-Series | 安川 - YRC 1000 NPN | NPN | |
| SCM-C-02-11-A | Yaskawa GP / HC-Series | 安川 - YRC 1000-micro | PNP | |
| SCM-C-02-12-A | Yaskawa GP / HC-Series | 安川 - YRC 1000-micro NPN | NPN | |
| SCM-C-03-01-A | DENSO | Denso - RC8A (Hand IO) | PNP | |
| SCM-C-05-00-A | ABB CRB 15000 GoFa | ABB - OmniCore C30 | PNP | |
| SCM-C-05-10-A | abb crb 1100 swifti | ABB - OmniCore C30/C90XT | PNP | |
| SCM-C-05-20-A | ABB IRB1100 | ABB - OmniCore C30/C90XT | PNP |
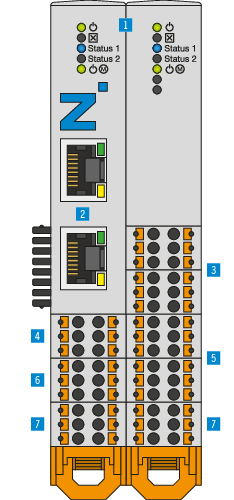
- 状态 SCM 和 IO-Link 设备的状态显示
- 以太网RJ45 机械夹爪配置的临时连接
- 数字输入端 用于控制机械抓手执行器的数字输入端
- IO-Link / 设备 1 抓取模块 1 连接
- 数字输出端 用于监控机械夹爪传感器的数字输出端
- IO-Link / 设备 2 抓取模块 2 连接
- 电源 SCM 和机械夹爪的电源

