Smart Communication Module
Serie SCM

- Conversión de IO-Link a entradas y salidas digitales (E/S digitales) y de E/S digitales a IO-Link
- Control muy sencillo de las pinzas IO-Link mediante E/S digital 24 V
- La configuración y el aprendizaje se lleva a cabo con el software intuitivo guideZ
- Juego de cables listos para conectar para el tipo de controlador correspondiente
- Se puede utilizar con una o dos pinzas, en función de la flexibilidad que se necesite
- En función de la flexibilidad requerida, pueden utilizarse hasta 15 piezas diferentes para una pinza. Como alternativa, se pueden utilizar dos pinzas.
| Referencia | Apropiado para tipo robot | Apropiado para tipo controlador | Lógica de E/S | |
|---|---|---|---|---|
| SCM-C-00-00-A | Independiente del fabricante | Independiente del fabricante | PNP | |
| SCM-C-01-00-A | Universal Robots | Universal Robots - OEM | PNP | |
| SCM-C-02-01-A | Yaskawa GP / HC-Series | Yaskawa - YRC 1000 | PNP | |
| SCM-C-02-02-A | Yaskawa GP / HC-Series | Yaskawa - YRC 1000 NPN | NPN | |
| SCM-C-02-11-A | Yaskawa GP / HC-Series | Yaskawa - YRC 1000-micro | PNP | |
| SCM-C-02-12-A | Yaskawa GP / HC-Series | Yaskawa - YRC 1000-micro NPN | NPN | |
| SCM-C-03-01-A | DENSO | Denso - RC8A (IO manual) | PNP | |
| SCM-C-05-00-A | ABB CRB 15000 GoFa | ABB - OmniCore C30 | PNP | |
| SCM-C-05-10-A | ABB CRB 1100 SWIFTI | ABB - OmniCore C30/C90XT | PNP | |
| SCM-C-05-20-A | ABB IRB1100 | ABB - OmniCore C30/C90XT | PNP |
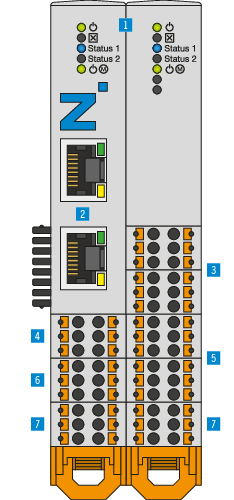
- Estado Indicación de estado del SCM y del componente IO-Link
- Ethernet RJ45 Conexión temporal para la configuración de la pinza
- Digital Input Entradas digitales para el control del actuador de la pinza
- IO-Link / Device 1 Conexión módulo de pinza 1
- Digital Output Salidas digitales para la monitorización de los sensores de la pinza
- IO-Link / Device 2 Conexión módulo de pinza 2
- Alimentación Alimentación de tensión de SCM y de pinza