AR125P

Układy wyrównania osi
Seria ARP
- Możliwość zaryglowania pozycji centralnej
Przy przejeździe robota można zamocować na stałe układ wyrównania, dzięki czemu nie dochodzi do niekontrolowanych ruchów elementu obrabianego. - Ekstremalnie niska konstrukcja
Konstrukcja ta minimalizuje obciążenie robota momentem i umożliwia stosowanie mniejszych, ekonomiczniejszych elementów. - Zmienne siły wyrównujące i momenty
Dopasowanie układu wyrównania do manipulowanego ciężaru za pomocą montażu — w zależności od pożądanej sztywności — odpowiedniego pakietu sprężyn.
Dane techniczne
| Kołnierz montażowy wg EN ISO 9409-1 | TK 125 |
| Wysokość konstrukcyjna | 28 [mm] |
| Wychylenie w poziomie +/- | 2 [mm] |
| Wychylenie w poziomie +/- | 1 [°] |
| Wychylenie w pionie +/- | 2 [mm] |
| Wychylenie w pionie +/- | 1 [°] |
| Siła centrująca przy ustalaniu ryglującym | 3000 [N] |
| Dokładność powtarzania w poziomie +/- | 0.05 [mm/°] |
| Dokładność powtarzania w pionie +/- | 0.05 [mm/°] |
| Objętość powietrza na cykl | 14 [cm³] |
| Ciśnienie robocze | 1 ... 8 [bar] |
| Nominalne ciśnienie robocze | 6 [bar] |
| Temperatura robocza | 5 ... +80 [°C] |
| Moment bezwładności masy | 61 [kgcm²] |
| Masa | 2 [kg] |


Konstrukcja w przekroju
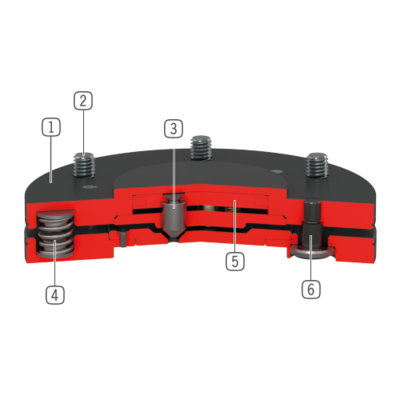
- Wytrzymała, lekka obudowa
Stop aluminium pokryty twardą powłoką - Kołnierz robota
Grupa części wg EN ISO 9409-1 - Blokada
3 tłoki ryglujące Stal azotowana - Pakiet sprężyn
Od rozmiaru 63 dodany jest drugi, mocniejszy. Od rozmiaru 100 można usunąć 3 sprężyny. - Napęd ryglujący
Siłownik pneumatyczny o pojedynczym działaniu - Bolec prowadzący z kulową panewką