LUDZIE I ROBOTY
RÓŻNE FORMY INTERAKCJI
KOMPONENTY KONWENCJONALNE
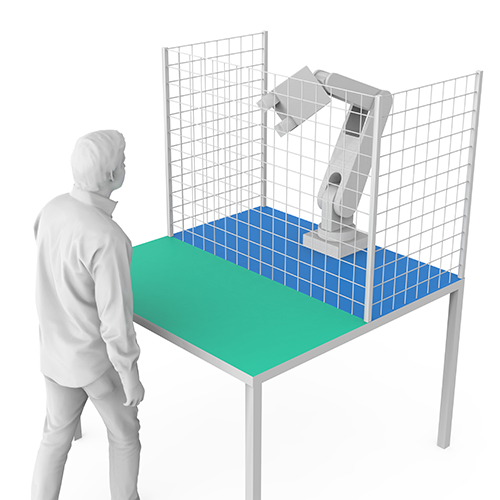
- Oddzielne pomieszczenia robocze
- Uchwyt obrabianego przedmiotu w zabezpieczonym obszarze
- Możliwość zastosowania wszystkich systemów chwytających
- Praca niezwiązana
- Bezdotykowość procesu
- Maksymalna prędkość
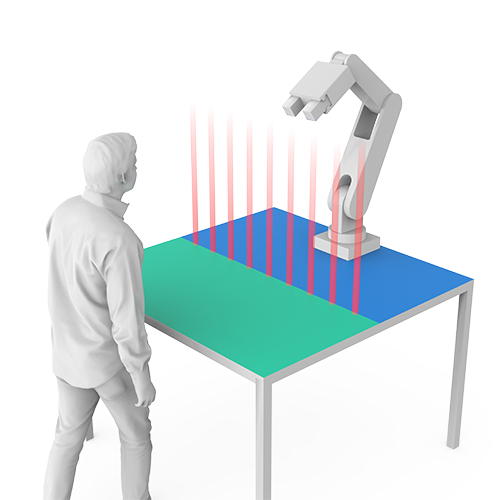
- Rozpoznawanie przebywania
- Uchwyt obrabianego przedmiotu w zabezpieczonym obszarze
- Możliwość zastosowania wszystkich systemów chwytających
- Oddzielne pomieszczenia robocze
- Praca niezwiązana
- Bezdotykowość procesu
- Mniejsza prędkość
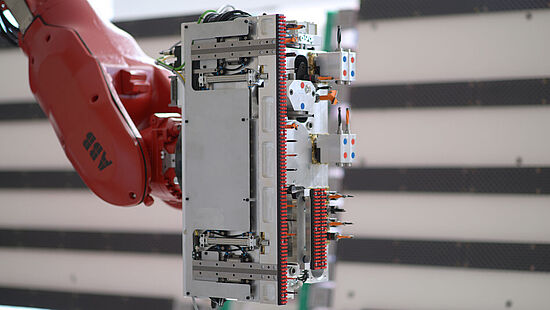
Konwencjonalne roboty przemysłowe
Historia sukcesu rozpoczęła się na początku lat 60. ostatniego stulecia wraz z konwencjonalnymi robotami przemysłowymi. Od tego czasu technologia ta bardzo szybko się rozwinęła. Roboty stały się bardziej niezawodne, elastyczne i prostsze w instalacji, programowaniu i konserwacji. W 1980 roku firma Zimmer Group wprowadziła na rynek pierwszy na świecie seryjny chwytak, stając się tym samym liderem wyznaczającym standardy w obszarze narzędzi typu „end of arm”.



Poziomy konfiguracji
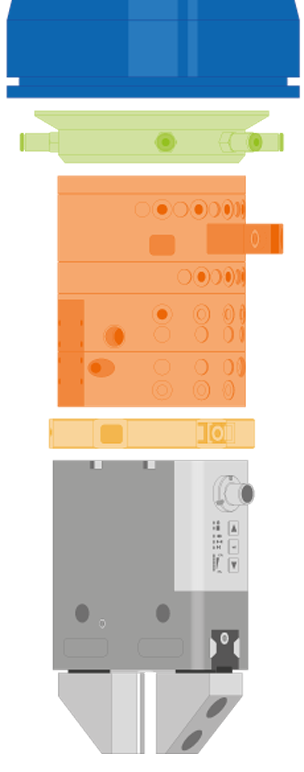
 | Kołnierz robotaDo mechanicznego podłączania kolejnych narzędzi. Doprowadzanie energii do komponentów zamontowanych na kołnierzu robota odbywa się wewnętrznie lub zewnętrznie w zależności od typu robota. W ten sposób można przekazywać sygnały sterowania oraz media pneumatyczne, elektryczne i hydrauliczne. |
 | Płyta pośrednicząca kołnierza robota — poziom wielofunkcyjnyPłyta pośrednicząca między konkretnym kołnierzem robota a rozstawem otworów ISO | .
 | Poziom wielofunkcyjnyKomponenty wielofunkcyjne z rozstawem otworów ISO do wymiany, wyrównywania, zabezpieczania i przeprowadzania. Dla zmieniacza narzędzi dostępne są ponadto elementy zasilające do przesyłania sygnałów i mediów.Rozdzielacze obrotowe, układy wyrównania osi, ochrona przed zderzeniem, kołnierz kątowy, zmieniacz narzędzia i elementy zasilające  |
 | Płytka pośrednicząca poziom wielofunkcyjny — komponenty automatyzacjiPłytka pośrednicząca między rozstawem otworów ISO a komponentem automatyzacji. |
 | Komponenty automatyzacjiRóżne właściwości komponentów automatyzacji w wersji bez lub z  |

Szybki i łatwy wybór chwytaków i akcesoriów. Inteligentne wyszukiwanie bazujące na najważniejszych kryteriach wyboru szybko prowadzi do wyselekcjonowanych propozycji wyboru.
Komfortowy przegląd zawiera wszystkie wyniki. Użytkownik może wybrać odpowiedni model spośród różnych chwytaków (wraz z akcesoriami). Proponowane produkty są wyświetlane w przejrzysty sposób wraz z najważniejszymi danymi.
Uszczegółowiony wybór dzięki filtrom. Za pomocą dodatkowych filtrów i specyficznych danych aplikacji można jeszcze bardziej ograniczyć wyniki wyszukiwania.
Przekonujące rozwiązanie, dostępne w każdym miejscu. Ponieważ wyszukiwarka produktów jest dostępna online, nie ma potrzeby instalowania żadnego oprogramowania.