Projekt-Update: SOFTMANBOT
Arbeit an den Sensorfingern
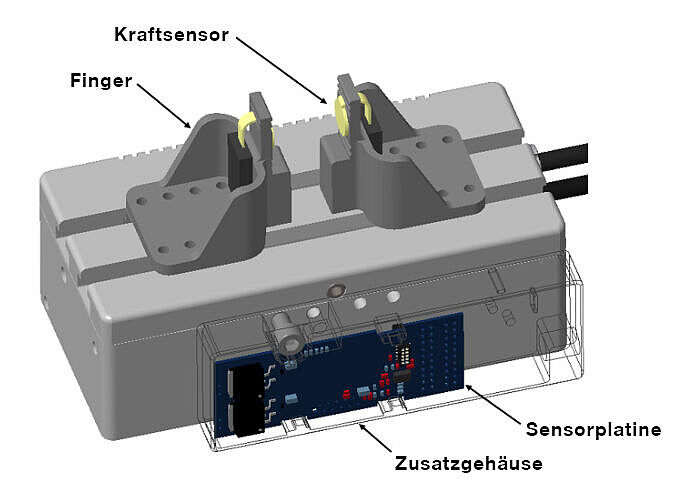
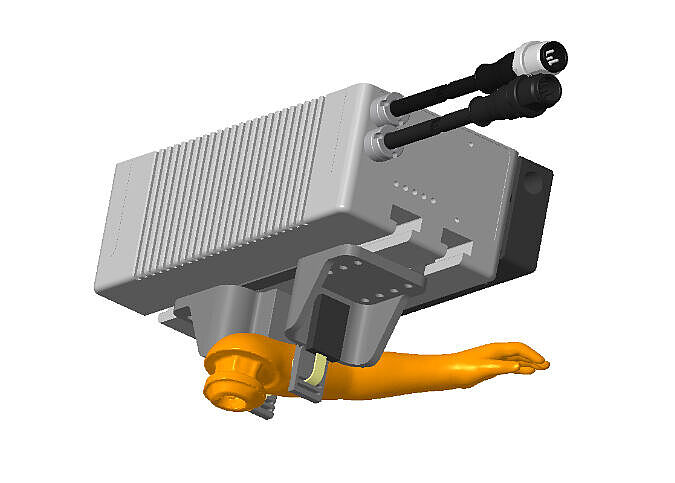
Bei @ZimmerGroup finden gerade die finalen Arbeiten an der Integration der Kraftsensoren am Prototypengreifer statt der für #SOFTMANBOT entwickelt wurde. Ziel ist es dies im nächsten Monat am industriellen Demonstrator beim Partner #JUEMA in Betrieb zu nehmen. Dabei werden die Sensordaten über eine Sensorplatine direkt in den Regler des mechatronischen Greifers eingespeist. Speziell programmierte Fahrprofile lesen die Kraftwert live aus und vergleichen ihn mit dem Zielwert, welcher von der übergeordneten Steuerung übermittelt wurde. Der Greifer interne Regelkreis leitet so lange neue Kommandos für den Greifer ab, bis der Zielwert erreicht wird.
Sobald dies passiert ist, sendet der Greifer die Positionsdaten der Finger an die Steuerung, hier kann damit die Deformation des Werkstücks überprüft werden. Gezielte Deformationen sind für die erfolgreiche Montage der Puppe nötig.
EU Forschungsprojekt SOFTMANBOT – Projekt-Update Zimmer Group